






Forum de mathématiques - Bibm@th.net
Vous n'êtes pas identifié(e).
- Contributions : Récentes | Sans réponse
- Accueil
- » Entraide (collège-lycée)
- » Changement de référentiel
- » Répondre
Répondre
Résumé de la discussion (messages les plus récents en premier)
- Zebulor
- 11-04-2024 10:57:57
Bonjour,
il faut définir une matrice de changement de repère : les anciennes coordonnées en fonction des nouvelles, ou l'inverse, je ne sais plus.
je n'ai pas vérifié les calculs, en tout cas le déterminant de cette matrice de rotation associée vaut bien 1 cette fois, et l'inverse de cette matrice est bien sa transposée...
- supertux
- 11-04-2024 09:56:40
J'ai repris les calculs, je trouve deux formules qui me donnent le bon résultat pour mon exemple :-)
- supertux
- 10-04-2024 22:04:14
Bonsoir,
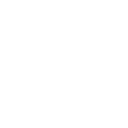
pour ma part j'ai un doute sur l'égalité : $RB=Y_M+CB$.$RB$ et $CB$ sont des distances donc positives, et $Y_M$ vaudrait -3 ... Alors est ce que ça ne serait pas plutôt $RB=-Y_M+CB$ ?
Si j'en crois on égalité impliquant $AB$, tu as $Y_M=RC$... et pour toi $Y_M$ vaut -3, or $RC$ est une distance me semble-t-il ...
Autre doute sur l'égalité $U_R=AB-MB$On a vite fait de se tromper de signe !
C'est là où je me perds, je manipule des distances (forcément positives), mais $X_M$ et$Y_M$ sont des coordonnées, négatives dans mon exemple. Je vais recommencer les calculs en faisant attention à ça
- supertux
- 10-04-2024 22:01:10
Je ne comprends pas : le robot est fixe ou il se déplace n'importe où dans la pièce ?
Il peut se déplacer n'importe où
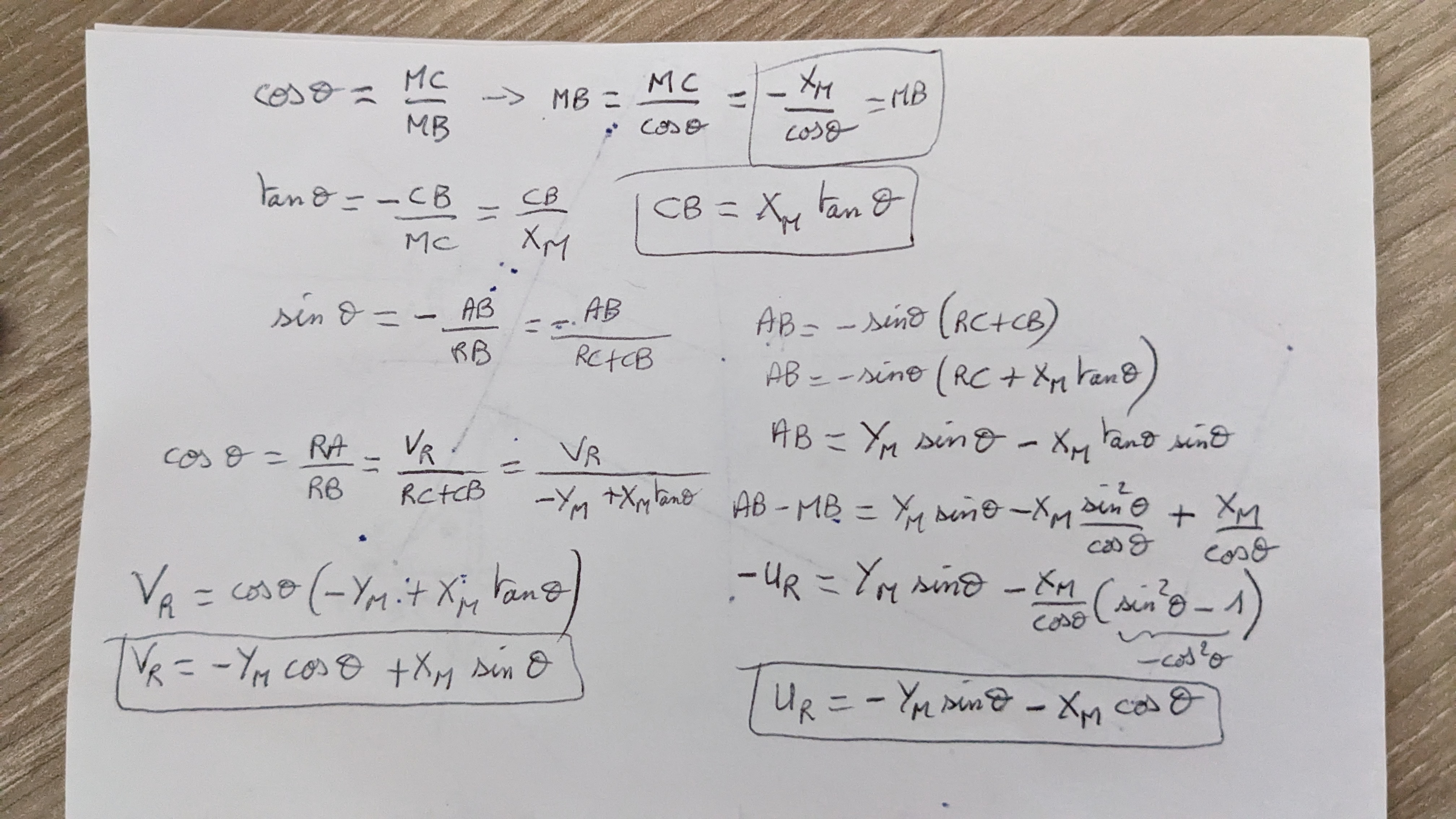
Pourquoi les $\dfrac {\sqrt 2} 2$ ?
C'est juste que dans mon exemple le robot est tourné de 45°; donc les racines de 2 viennent de cos et sin Pi/4
- Zebulor
- 10-04-2024 20:41:09
Bonsoir,
pour ma part j'ai un doute sur l'égalité : $RB=Y_M+CB$.
$RB$ et $CB$ sont des distances donc positives, et $Y_M$ vaudrait -3 ... Alors est ce que ça ne serait pas plutôt $RB=-Y_M+CB$ ?
Si j'en crois on égalité impliquant $AB$, tu as $Y_M=RC$... et pour toi $Y_M$ vaut -3, or $RC$ est une distance me semble-t-il ...
Autre doute sur l'égalité $U_R=AB-MB$
On a vite fait de se tromper de signe !
- Borassus
- 10-04-2024 19:55:02
Je ne comprends pas : le robot est fixe ou il se déplace n'importe où dans la pièce ? Pourquoi les $\dfrac {\sqrt 2} 2$ ? qui correspondent à des angles multiples de 45° ? (Je ne me suis pas plongé dans tes calculs ; mon attention a juste été attirée par ces quotients .)
D'autre part, je remarque que ton angle $\theta$ a changé par rapport au dessin initial, ce qui correspond bien maintenant à l'orientation par rapport au mur long.
- supertux
- 10-04-2024 19:00:06
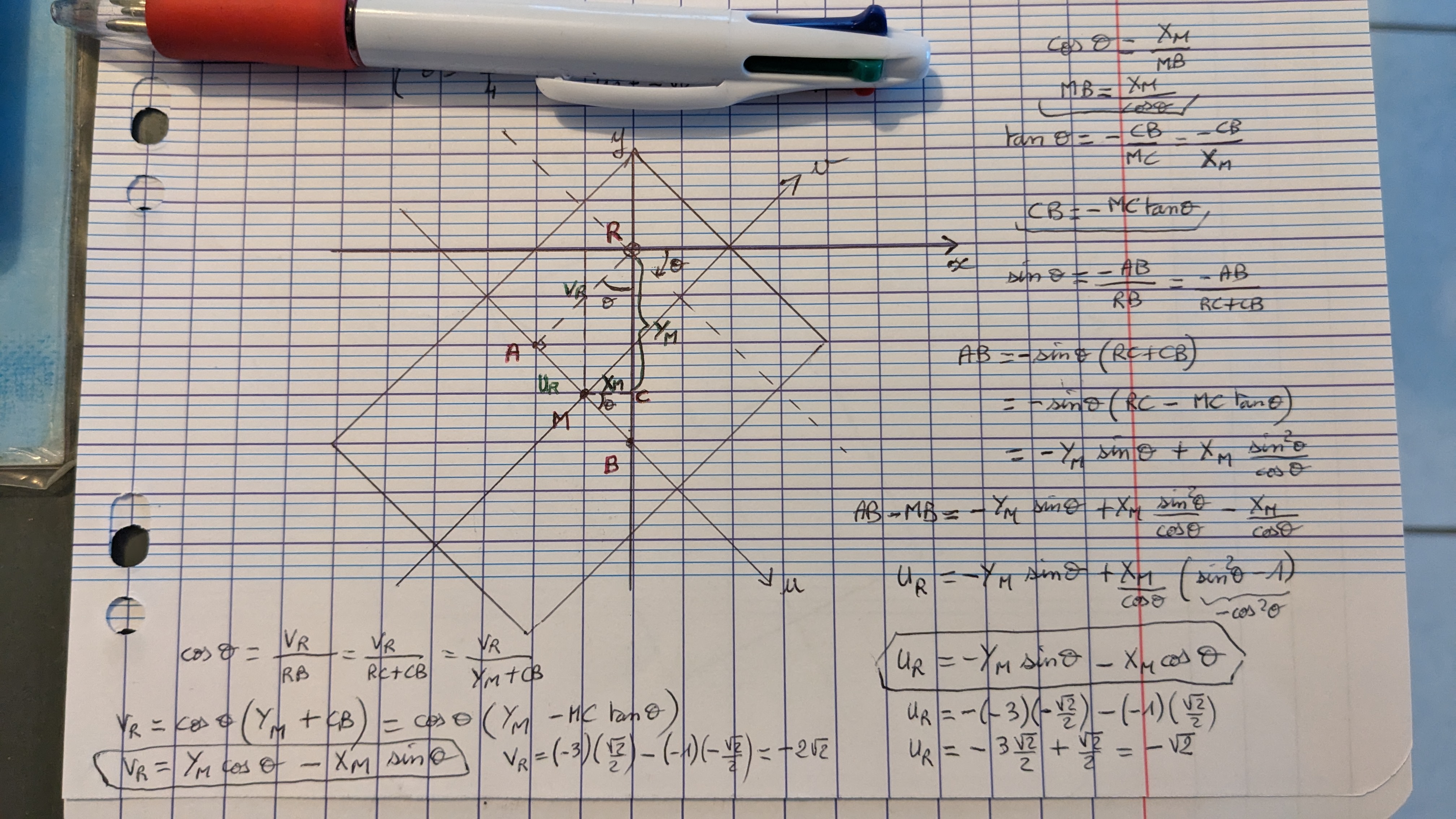
Je ne comprends pas bien ta figure : l'angle $\theta$ que tu indiques ne semble pas correspondre à l'orientation du robot par rapport au grand mur.
Qu'entends-tu par "orientation du robot" ? Vers où il "regarde" ?
oui, là dans mon schéma il regarde vers la gauche (vers le coin en haut à gauche)
J'ai essayé d'exprimer les longueurs en fonction de theta, c'est presque ça sauf que mon Vr est négatif alors qu'il devrait être positif...
- Borassus
- 10-04-2024 14:11:21
A priori, commence par exprimer $x_M$ et $y_M$ en fonction de $u_R$, $v_R$ et $\theta$.
Tu auras alors un système à deux équations, deux inconnues.
- Borassus
- 10-04-2024 13:57:25
Je ne comprends pas bien ta figure : l'angle $\theta$ que tu indiques ne semble pas correspondre à l'orientation du robot par rapport au grand mur.
Qu'entends-tu par "orientation du robot" ? Vers où il "regarde" ?
- Borassus
- 10-04-2024 13:34:57
(Un message commence par Bonjour, surtout en réponse à une réponse :-)
Est-ce que vous avez étudié les matrices ?
- supertux
- 10-04-2024 13:30:46
c'est pour un robot que l'on construit au club de robotique du lycée
- Borassus
- 10-04-2024 12:43:29
Bonjour supertux,
Cela fait longtemps que je n'ai pas utilisé cette technique, mais il me semble qu'il faut définir une matrice de changement de repère : les anciennes coordonnées en fonction des nouvelles, ou l'inverse, je ne sais plus.
Ce problème est demandé dans quel cadre ?
- supertux
- 09-04-2024 11:54:02
Bonjour,
Je cherche de l'aide pour le problème suivant. J'ai un robot qui se trouve dans une pièce rectangulaire. Je connais son orientation par rapport au plus grand mur (angle theta dans la figure), et je connais les coordonnées du centre M de la pièce dans le référentiel du robot : Xm, Ym
Je cherche à calculer maintenant les coordonnées du robot (Ur, Vr) dans le référentiel de la pièce (centre M: origine, axes u, v parallèles au petit mur et grand mur, respectivement).
Toute aide sera appréciée :)